Company
Road
Experience
Management™
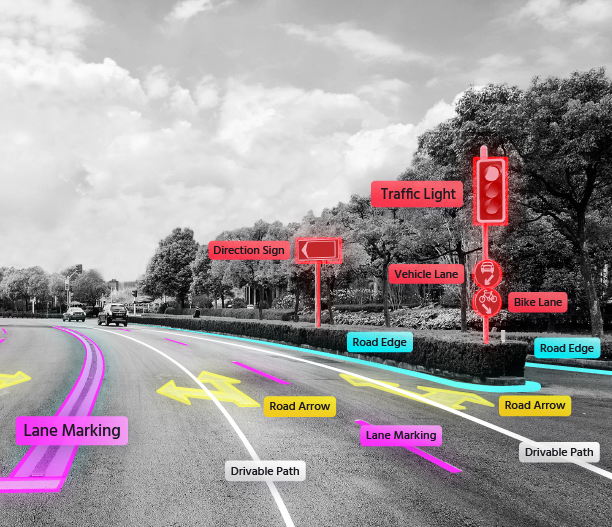
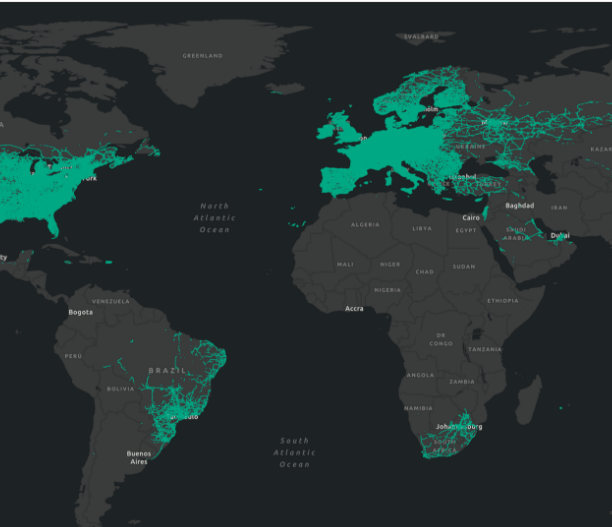
To facilitate autonomous driving anywhere in the world, we first need to map everywhere in the world. But not just any maps will do. Instead of overemphasizing global accuracy, Mobileye’s crowdsourced, continuously updated map of the world digitizes precisely what AVs need – nothing more, nothing less. We’re making maps for the autonomous future.
Enabling Autonomous Vehicles
Anywhere in the World
The broad, global coverage of the Mobileye Roadbook, powered by REM, enables deployment of AVs in new locations almost instantaneously. Below, you can see videos of our developmental AV driving in different countries, on different continents, in very different environments



How it works
5
6

7

1
2

3

4
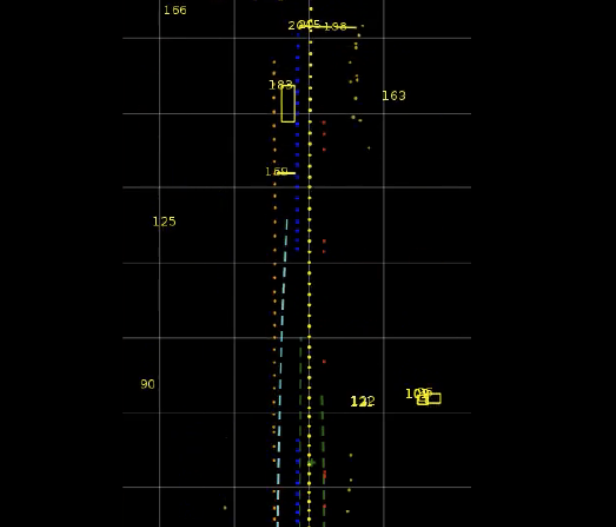
REM maps have no other sources of data. The Mobileye Roadbook is produced independently of any third-party map and relies exclusively on the process you see here.
Unlike conventional static maps, the Mobileye Roadbook encompasses a dynamic history of how drivers drive on any given stretch of road to better inform the AV’s decision-making process.
Privacy is fundamental to Mobileye. Our data-collection processes implement strict methodologies to comply with data protection and privacy laws, foremost among them the European General Data Protection Regulation (GDPR). The data we collect and process is anonymous except where we explicitly state otherwise.
Common Industry Approach vs. The Mobileye Approach
Common Industry Approach – HD Maps
- Not Scalable
Reliance on dedicated mapping fleets with expensive sensors (lidar, camera, INS) - Manual/semi-automatic mapping process
- Infrequently updated – changes are not
reflected in real time
- Overly specified geometric accuracy in global coordinates
- Relying on raw data on road semantics that have no specifics or insight on human driving patterns
Mobileye’s Approach – AV Maps
- Scalable-by-design
Millions of Mobileye-equipped ADAS vehicles sending data to the cloud in small data packets (10kb/km) - Fully automated map generation at the push of a button
- Maps can be updated in near-real time because of sophisticated change-detection algorithms on millions of mapping agents
-
Superior local accuracy:
where it matters -
Using the “wisdom of the crowd” to create
rich semantic layer of driving culture and
traffic rules
Why REM is a unique solution for AV mapping
How AV R&D is impacting ADAS today
While the Mobileye Roadbook was developed for a future in which self-driving cars are ubiquitous, many of the safety benefits can reach roads today by adding our maps to advanced driver-assistance systems.
Enabling enhanced ACC
(Adaptive Cruise Control):
 Bad Weather
Bad Weather Low Visibility
Low Visibility
Enabling advanced ADAS in production vehicles around the globe via:
Mobileye SuperVision™



