blog
|
February 23, 2023
The Unwritten Rules of the Road, Codified in RSS™
Our drive for autonomous vehicle safety led Mobileye to formulate the Responsibility-Sensitive Safety™ model and share it with the world.
Responsibility-Sensitive Safety™ is an open, comprehensive, and verifiable mathematical model for autonomous vehicle safety.
Picture yourself pulling up at an intersection. The right of way is yours, and the intersection looks clear – but still you proceed cautiously, with your foot covering the brake pedal. And good thing you did, because the other driver didn’t yield, and then a pedestrian you couldn’t see stepped off the curb from behind a parked van.
Had you simply acted according to what you saw when approaching the intersection and legitimately followed the written rules of the road, you might have collided with one or both of them. But as an experienced driver, you followed your intuition and heeded the unwritten rules of the road as well.
At Mobileye, we understand that those informal “rules” are no less important than the formal ones, so we’ve codified the former into the Responsibility-Sensitive Safety™ model – an open, comprehensive, and verifiable mathematical model for autonomous vehicle safety. It’s a formula for enabling self-driving cars to safely share the road with human drivers and a crucial element in the effort to deploy AVs at scale around the world.

Why Do We Need an Autonomous Vehicle Safety Model?
The Responsibility-Sensitive Safety model (RSS™) is based on the premise that for self-driving technology to be both safe and useful, it must be able to handle not only the majority of everyday driving tasks, but the “edge cases” as well. That is, it must be able to deal with unexpected events in an inherently unpredictable driving environment – at least for as long as autonomous vehicles (AVs) share the road with human drivers.
What an AV needs, then, is a set of parameters by which to evaluate all of its decisions. Not simply to control the vehicle’s movements or to strictly abide by traffic laws, but an all-encompassing framework for autonomous vehicle safety allowing the AV to deal with whatever situation might arise – even those we cannot predict.
Five Rules to Live and Drive By
RSS rises to that challenge by codifying the intuitive skills of driving into five all-encompassing rules:
1) Do not hit the car in front of you – based on a mathematical formulation of the “two-second rule” we all learn in driving school.
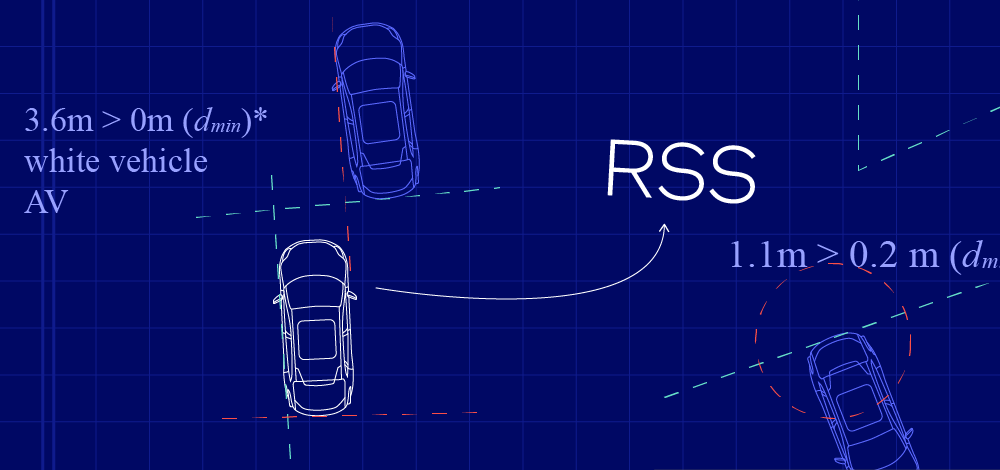
2) Do not cut in recklessly – similar to the longitudinal safe distance established by Rule #1, but applied here to the lateral distance between vehicles.
3) Right of way is given, not taken – which tells the AV to watch out for other vehicles that may not yield the right of way to it, even when they should.
4) Be cautious in areas with limited visibility – just because the vehicle’s sensors can’t detect a potential hazard doesn’t mean the way is clear.
5) If you can avoid a crash without causing another one, you must – because ultimately, the goal is to prevent collisions.
We believe that any AV following the five rules of RSS will never cause an accident, and will respond safely and appropriately to any potentially dangerous situation it might encounter. To substantiate that position, we’ve opened RSS up to independent scrutiny, and continue to invite outside members of industry, academia, and government to identify any scenario that an AV operating under RSS would not be able to handle.
The Leanest Possible Driving Policy
RSS stems from a research paper on autonomous vehicle safety published in 2017 by three of Mobileye’s leading minds, but its real-world applications extend far beyond the academic.
RSS forms the basis of the singularly lean driving policy by which our AVs operate. Rather than trying to determine every possible scenario that could potentially happen, our RSS-based driving policy focuses on what is likely to happen. It does so by continually calculating reasonable worst-case assumptions within the range of realistic possibilities – not unlike how a human drives.

This “lean” computing process takes place on our highly efficient and compact EyeQ™ Systems-on-Chip and enables the AV to make sound, split-second decisions on how to operate in real-world scenarios – not just in limited geographic areas, but in locations around the world, where driving conditions and behavior differ widely.
Opening Roads to Autonomous Mobility
However good and trustworthy it is, developing the technology required for an AV to function correctly is only part of the equation. To deploy autonomous vehicles at scale, AVs will need roads on which they’re allowed to drive. And that means that government regulators will need to adapt the rulebooks developed over the course of decades for human-driven vehicles to include self-driving vehicles as well.
RSS supports that process by not merely telling, but showing regulators that self-driving technology based on RSS can be trusted to safely operate on public roadways. And that empowers regulators, policymakers, and other stakeholders to make informed decisions in paving the way for autonomous mobility.
The adaptability of RSS even allows for individual jurisdictions to customize the model to suit their local roadways and driving cultures. One country might prioritize safety, for example, by mandating that AVs maintain a greater distance from other vehicles, while another might emphasize fitting more seamlessly into traffic. RSS allows for such fine-tuning – much in the same way that speed limits are determined according to local conditions.
Arguably more than any individual application or parameter, however, the Responsibility-Sensitive Safety framework is about engendering trust through transparency. And we believe that trust is precisely what’s needed for the world to embrace the future of transportation whose time has come.
Share article
Related News



Press Contacts
Contact our PR team




