to be a failure
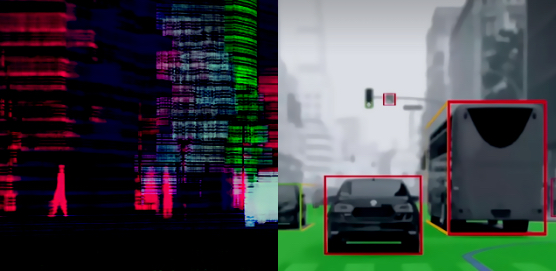
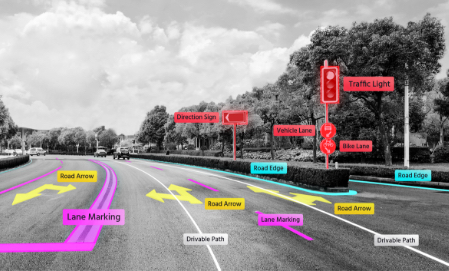
As we explained before, for the Perception System, this is clear since there is a notion of “ground truth”. For the Driving Policy, regulation must formally define the notion of “reasonable risk” and therefore set the balance between safety and efficiency. We note that regulation already partially perform this task. For example, when setting the speed limit at any given road, it partially tells human drivers that driving faster than the speed limit is too risky while driving below the speed limit is considered a reasonable risk. However, the current law is not complete since it doesn’t cover all aspects and all scenarios, and it also contains vague notions like “drive according to road conditions”.