Smart power,
not horsepower
The radical decision to build our own microprocessor has enabled us to reach 100 million Mobileye-inside vehicles on the road.
Dig deeper


Prof. Amnon Shashua
CEO and Founder, Mobileye
Dig deeper
Dig deeper
We’re teaching the vehicle to drive based on cameras alone, and teaching the vehicle to drive based on radars and LiDARs alone. In the unlikely event that one’s not 100% effective, the other steps up as a truly independent backup. We call this True Redundancy™.
Read more
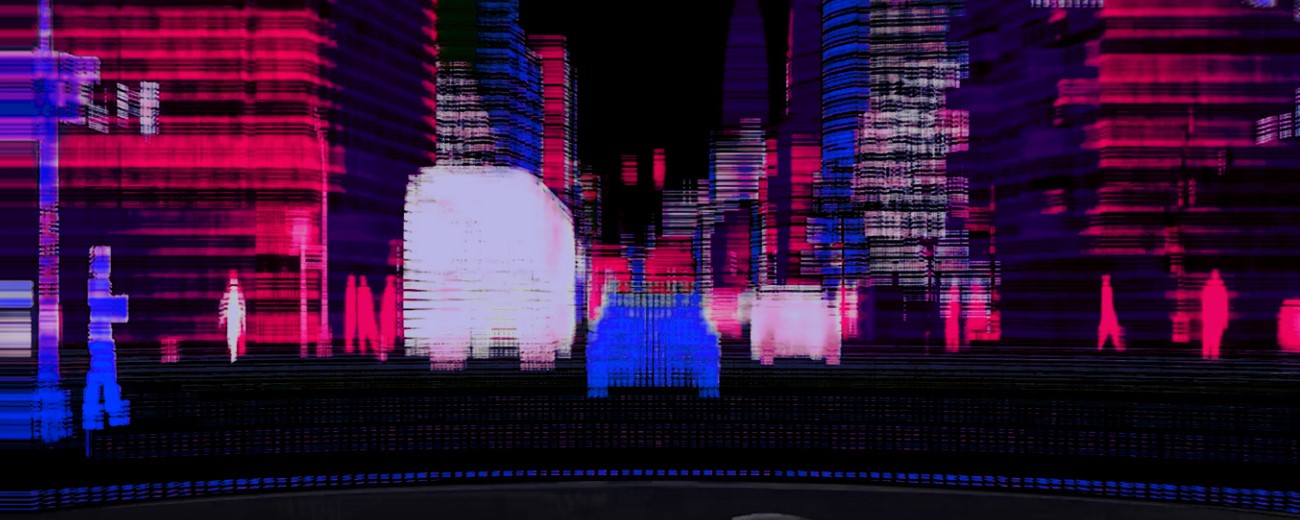
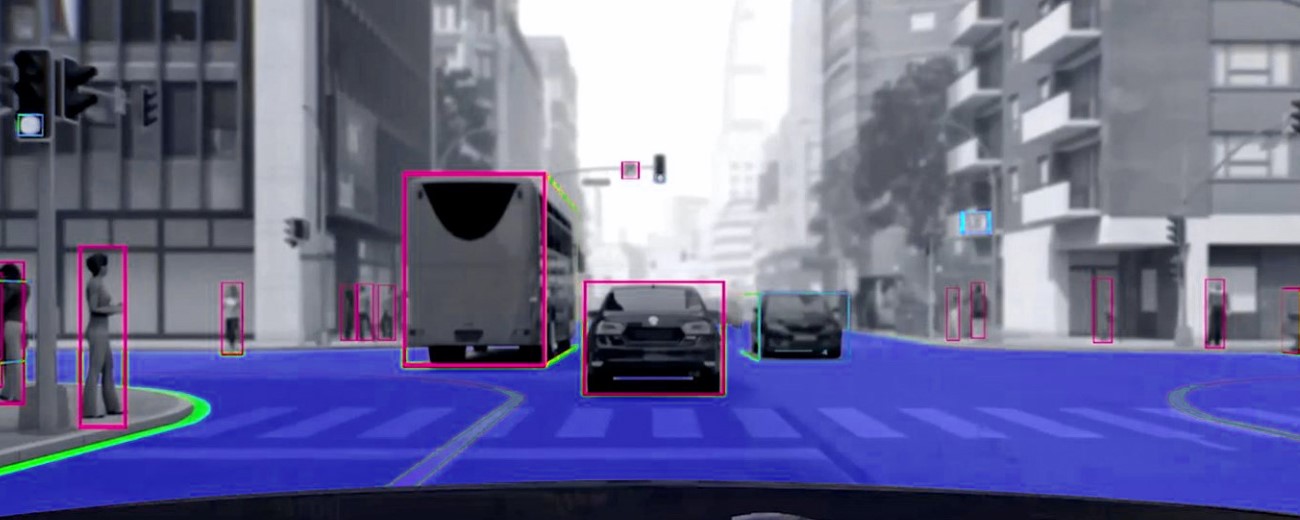
CAMERA SYSTEM VIEW
RADAR & LIDAR SYSTEM VIEW
Dig deeper
Dig deeper
Society has defined what it means for humans to drive safely. To get autonomous vehicles on the road, we need to do the same.
Read more
Learn more about our safety methodology and how it reframes critical issues.
Explore our safety methodology




